Forces
Before we talk about internal forces, let’s quickly just talk about what a force is. In the most simplest terms, it’s a push or pull exerted on an object from its interaction with another object. You may have heard of Newton’s Laws of Motions. These 3 laws give a relationship between objects and forces.
Law #1: An object stays at rest or in constant motion unless acted upon by an external force.
Law #2: F = ma (Force = mass * acceleration) (acceleration is change in velocity)
Law #3: For every action, there’s an equal and opposite reaction.
Free Body Diagrams
Let’s also quickly review free body diagrams. A free body diagram is used to look at what forces are acting on something.
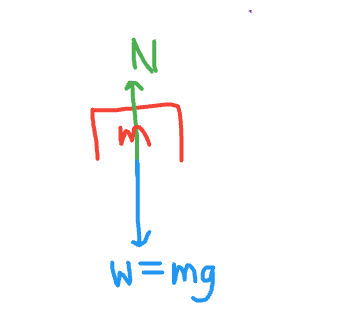
In the image above, first there’s always a weight force pointing downwards from the object. Since it’s sitting on a surface, there’s a normal force pushing up. A normal force is one that’s normal (perpendicular) to the surface. The object is stationary, so that means the object is at equilibrium and the normal and weight forces are equivalent to each other.
Internal Forces
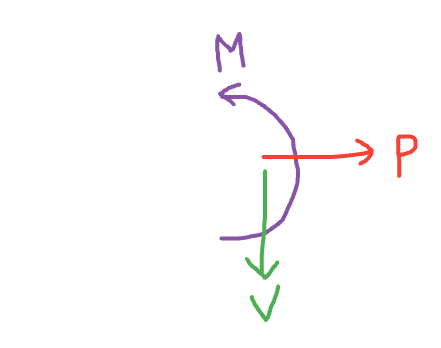
Within a beam, there are 3 forces: Axial Force (P), Shear Force (V) and Bending Moment (M). Let’s talk about each one of these in detail.
Axial Force (P)
First is the Axial Force (P). From the name, you could probably assume that it’s the force that pushes “sideways”. In other words, it’s the force that acts along the longitudinal axis and it either causes Tension (stretching), or compression (squashing).
Shear Force (V)
Second is the Shear Force (V). This one acts perpendicular to the beam’s axis. It is caused by external forces and the reactions at the supports.
Bending Moment (M)
Lastly is the Bending Moment (M). To begin, the general definition of “moment” is force created by rotation. Bending moment in particular is the internal moment induced by external forces.
In the diagram above, we did a cut that looks at the left side of the beam. If we did a cut that looks at the right side of the beam, all the orientations of the internal forces/moments would be reversed. For example, Axial Force will go towards the left, Shear Force upwards, and Bending moment will be clockwise.
Problem Solving Methods
Whenever we want to find the internal forces in a beam, one way is to do equilibrium of the whole beam, make a “cut” in the beam, analyze all the forces present, create a FBD and solve for the unknowns. This way is pretty straight forward.
Another way is through integrals. We began by taking equilibrium of the whole beam, and then we set up our integrals. These integrals are: \(V_{1} = V_{A} - \int_{0}^{x} W(x) \,dx\) where \(W\) is the distributed force (0 if there are none) and \(V_{A}\) is any external force present at the beginning of the section. The second integral is: \(M_{1} = M_{A} + \int_{0}^{x} V_{1} \,dx\) where \(M_{A}\) is any external moment present at the beginning of the section. We are finding the Shear Force (V) and the Bending Moment (M) here. Usually, we get equations and from there we can graph it to see how the internal forces act through the beam over time.
Example
It’s hard to still understand it through just reading it, so I will do a super simple example. I’m not going to do method 1 since it’s pretty straightforward (yet time consuming sometimes), and method 2 is the much easier and better method.
Method 2
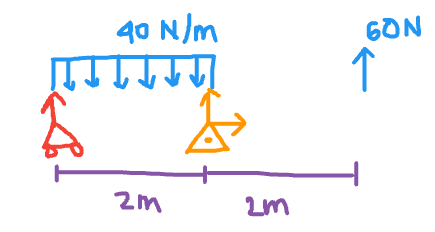
First, let us solve for the distributed force
\(40 \frac{N}{m} \cdot 2m = 80 N\).
We are just taking the area to get the distributed force. Next, the location of the force will be in the center since it’s a rectangle, so at 1m.
There is also an Ay force at the roller support on the far left, and Bx, By forces on the pin support in the middle.
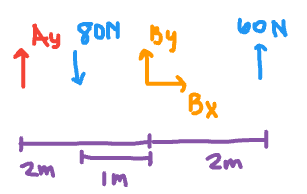
Let’s now take equilibrium (summing up all the forces and setting it equal to 0 since this is a static problem):
\(F_{x}\) Equilibrium: \(\sum_{}^{} F_{x} = B_{x} = 0\)
\(F_{y}\) Equilibrium: \(\sum_{}^{} F_{y} = A_{y} + B_{y} - 80 + 60 = 0\)
\(M_{B}\) Equilibrium: \(\sum_{}^{} M_{B} = -A_{y}(2) + (80)(1) + (60)(2) = 0 \rightarrow A_{y} = 100 N, B_{y} = -80 N\)
Next step is to section off the beam to take the integrals. The logical step would to make \(0 \leq x<2\) Section 1, and \(2 \leq x<4\) Section 2 since the distributed force ends at 2 m.
Now for our integrals. Let’s first find the equations for section 1:
\[V_{1} = V_{A} - \int_{0}^{x} W(x) \,dx\]First, our \(V_{A}\) will be \(A_{y} = 100 N\), as that’s the external force present at the beginning of the section. Next, \(W(x)\) is the equation of the disributed force. Since it’s just a straight line, it’s just \(y = 40\). If you want, you can even find the slope using points (0,40) and (2,40), giving you a slope of 0 and then plugging it into point-slope form equation, resulting in \(y = 40\). Our bounds are 0 to x, as the section starts at 0m, and we are cutting it to an arbritary ‘x’ m as we want the general equation for the shear force, not the exact shear force at the location.
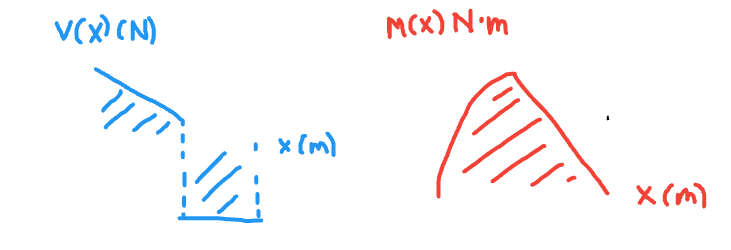
\[V_{1} = 100 - \int_{0}^{x} 40 \,dx \rightarrow V_{1} = 100 - 40x\]\[M_{1} = M_{A} + \int_{0}^{x} V(x) \,dx\]There is no external moment present at the beginning of this section, so our \(M_A\) is just 0. For \(V(x)\), we just plug in the \(V(x)\) we found previously.
\[M_{1} = 0 + \int_{0}^{x} 100 - 40x \,dx \rightarrow M_{1} = 100x - 20x^{2}\]
Now, let’s do section 2, which is from \(2 \leq x < 4\).
\[V_{2} = V_{x=2} + V_{A} - \int_{0}^{x} W(x) \,dx\]First, our \(V_{A}\) will be \(B_{y} = -80 N\), as that’s the external force present at the beginning of the section. We also need to find the Shear Force at x=2m with our \(V_1\) equation to take into account the shear force at 2m, since our previous integral did not. Next, \(W(x)\) is the equation of the disributed force. Since there is no distributed force from \(2 \leq x < 4\), \(W(x) = 0\). Our bounds are 2 to x, as the section starts at 2m, and we are cutting it to an arbritary ‘x’ m as we want the general equation for the shear force, not the exact shear force at the location.
\[V_{2} = 20 + (-80) - \int_{2}^{x} 0 \,dx \rightarrow V_{2} = -60\]\[M_{2} = M_{x=2} + M_{A} + \int_{2}^{x} V(x) \,dx\]There is no external moment present at the beginning of this section, so our \(M_A\) is just 0. We also need to find the Bending Moment at x=2m with our \(M_1\) equation to take into account the bending moment at 2m, since our previous integral did not. For \(V(x)\), we just plug in the \(V(x)\) we found previously.
\[M_{2} = 120 + 0 + \int_{2}^{x} -60 \,dx \rightarrow M_{2} = 240 - 60x\]
We are done finding the equations of the shear force and bending moment for the 2 sections! Now, we can graph it to see how it looks like.
And that’s it! Hopefully this made sorta sense, or at least was interesting to read. Thanks for reading everyone! Please let me know your thoughts :)
]]>